Kinco伺服在药液杂质灯检机上的应用
2018-12-25
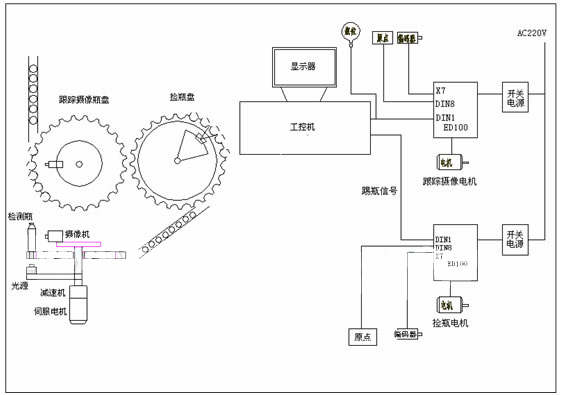
液体杂质灯光检测机,是利用工业摄像机对已加工好的液体药品进行杂质检测与分拣的设备。灯检机在运行中要求摄像头与瓶盘同步运行且运行速度平稳,检测摄像头必须与检测瓶在运行过程中相对静止,以保证获取的图像信息清晰与准确。传统的检测设备使用凸轮曲线来完成一系列动作,工作效率低、检测准确率低、摄像机容易损坏。使用Kinco 伺服系统来替代凸轮后,检测的速度、检出准确率及设备的性能均提高了一个档次。
Kinco控制方案
1.因检测伺服电机的跟随角度较小(检测的角度为7度,跟随时间为0.4 秒),检测的频率很高(0.4秒完成跟随与返回的动作,即每分钟往返150 次),故伺服电机在运行中必须严格按照运动曲线要求的时间运行,否则将会造成拍摄失败与跟随错误。
2.运动曲线运行时间段划分:伺服电机加速时间段:0-0.1秒;伺服电机匀速摄像时间段:0.1-0.2秒;伺服电机减速时间段:0.2-0.3秒;伺服电机返回原点时间段:0.3-0.38秒。Kinco 伺服所具备低速时大扭矩的特点从而保证系统要求的加速度。方便的实现 PID 的动态调整。
3.因伺服电机在运行中加、减速度较高;正反转交替频率快。所以伺服电机的运行机械特性要软,否则会损坏安装在伺服电机上的摄像机和光源。这点可以通过动态修改 Kinco 伺服的 PID 实现,确保不同运动曲线段采用不同的 PID 参数,来保证不同曲线段分别对速度、刚性的要求。由于 Kinco 伺服具备强大通讯功能,可以非常方便的实现 PID 的动态调整。